Transport automation is expected to be critical to overall mobility infrastructure for creating long-term value at both the national and international levels. We suggest building on radical innovations supported by “robomobility” and setting up an international discussion platform for the Group of Twenty (G20). This would help governments and policymakers share best practices for investment in and financing and management of infrastructure, and to design innovative frameworks. One substantial outcome should be a set of guidelines for complex infrastructure investment programs that enables the convergence of transport, connectivity, urban development, and energy and thus, creates a pathway to a carbon-neutral sociotechnical system.
Challenge
New practices of mobility are critically needed to address the global and local challenge of reducing greenhouse gas emissions. The potential rise in the use of automated vehicles may usher in new kinds of mobility practices—both for passenger travel and goods transportation. [1]
The deployment of robomobility[2] services[3] requires investment in three main areas of overall mobility infrastructure: physical infrastructure (roads, hubs, and telecommunication devices), digital infrastructure (connectivity, artificial intelligence, and mapping), and energy infrastructure (energy-mix diversification, electricity production, storage, and distribution). However, there exists no clear evidence that these three types of infrastructures have adequate focus from public and private sectors or that they are being sustainably integrated with existing transportation systems in urban growth plans. In light of this drawback, the current policy brief seeks to highlight the importance of integrating physical, digital, and energy dimensions in the design of transportation infrastructure.
We address three key questions:
- How can automated vehicles and services contribute to the transition toward carbon-neutral transportation systems?
- To what extent does infrastructure play a role in influencing automated mobilities?
- Can infrastructure public policies truly drive the change toward the emerging sociotechnical system[4],[5] of a “robomobile life”?
These three key questions arise from the rationale that technologies and infrastructure might influence lifestyles and long-term societal transformation, but conditioned on their social integration. That is,
- Will the driverless transportation revolution develop and diversify as anarchically as the Internet did since the beginning of the 21st century?
- Will robomobility (when using electric or hydrogen-powered vehicles), ubiquitous connectivity, and shared mobility services lead to technological and organizational innovations that restructure the whole transportation system?
- To what extent are robomobility services and their geographical expansion dependent on infrastructure enhancements and adaptation?
- Will automated, shared, and connected mobility affect land uses and planning through Mobility-as-a-Service (MaaS)[6] and other emerging services associated with robomobility?
There exists a lack of knowledge (i.e., data), experience, understanding, and standards within the G20 regarding how infrastructure choices influence urban growth, human and firm behaviors, and more generally, workplace and lifestyles. For example, there is no consensus among experts on whether traffic congestion will decrease or increase, and this is due to the uncertainties regarding empty rides and the possible reactions of the social system to the new robomobility opportunities. There also exists a lack of experience in the management of infrastructure required for driverless vehicles, such as lane allocation on highways and in urban areas.
Thus, we pose the question: Is it possible to advance incrementally or should governments “go big” now to send major signals to markets and decision-makers? It seems necessary that the Group of Twenty (G20) must discuss and exchange its experiences and understandings of these issues in order to elaborate shared guidelines, principles, and standards of technical infrastructure management and societal needs.
Summary of Recommendations
We promote an international platform at the G20 level to
- share best practices on infrastructure investment and financing; and
- help design innovative frameworks.
This platform would help
- broaden the scope of functionalities and services in shaping new investment frameworks for infrastructure;
- explore new models of infrastructure management at the earliest stages of the investing and financing processes; and
- explore new systemic risks in robomobility infrastructure systems integration, especially network interdependency and cybersecurity threats.
This platform will produce a shared set of guidelines/principle for policymakers for the design, finance, and management of infrastructure and associated mobility services.
Proposal
Broaden the Scope of Functionalities and Services for New Investment Frameworks
Rationale
The need to invent and implement carbon-neutral sociotechnical systems as well as the hunt for opportunities in artificial intelligence, automation, and digital technologies are often found to be complementary. This relationship is the foundation of transportation infrastructure as a key asset and strategic resource in building integrated infrastructure systems across multiple functionalities and services. The design of infrastructure (both Greenfield projects and the refurbishment of existing and ageing infrastructure) is likely to integrate various (“robo”) mobility functions and services. Robomobility could then lead to a common framework intersecting three major areas of infrastructure investment: digital, energy, and physical road infrastructure.
First, digital technologies, and their many related uses, have been driving innovation in the mobility sector for the past decade.
They are also poised to capture significant investments for the deployment of 5G infrastructure and technologies. Figure 1, from a Global mobile Suppliers Association report, shows that operators on every continent, including Africa, are investing in 5G networks and technologies.
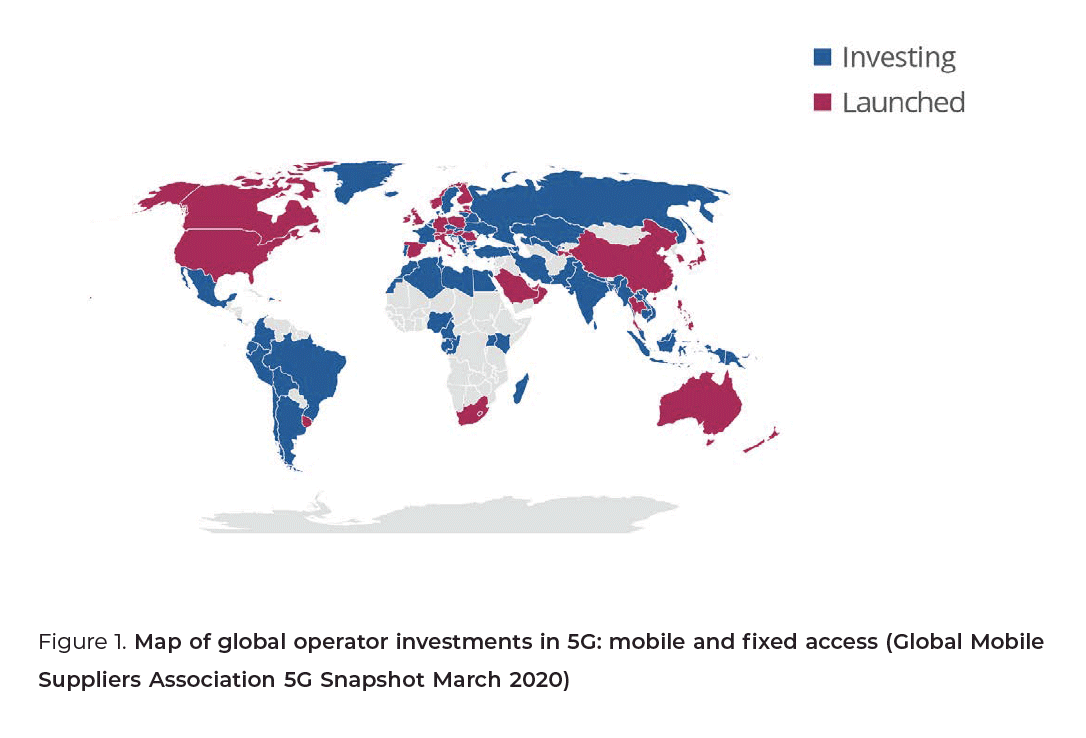
5G applications and markets are wide-spread.[7] Without first-class connectivity, any push toward driverless vehicles, automated transportation, and robomobile services would be hindered. Hybridization of 5G networks and physical transportation networks is, therefore, one element in the deep transformation of business models from sectorial to “Infratech.” The return on investments (ROI) of such Infratech models are to be estimated through a global approach across multiple intricate value chains. For instance, 5G networks have diverse applications—from driving operations of vehicles, data streaming for passenger use, road traffic regulation, and monitoring of road maintenance operations to provision of freight status data for logistics and supply chain management. The convergence of connectivity with robomobility can help build sociotechnical systems around the Internet of Things and physical Internet networks. It offers an opportunity to observe/study the emergence of sociotechnical systems and their effect on infrastructure investment models.
Second, transportation was responsible for about 24% of direct CO2 emissions and 8 Gt of CO2 emissions in 2008 globally.[8] The International Energy Agency outlines a Sustainable Development Scenario that reinforces the need to reverse the greenhouse gas emissions trends within the next decade. According to the agency, an “integrated, coherent and coordinated set of policies is required to put the transport sector on the [Sustainable Development Scenario] pathway.” These policies have three key levers: travel demand management, energy efficiency, and sustainable fuels. There is multilateral agreement across countries on the need to invest in these directions. However, policies for the infrastructures of this “new climate economy” require greater coordination. Automated transportation and robomobility services could offer this opportunity to explore frameworks for integration between energy infrastructure, digital, and physical infrastructures.
In addition to integrating land-use planning and transport, governments and cities can accelerate emissions reductions and foster productivity gains and agglomeration economies of enhanced accessibility. This transformation would particularly require adoption of next-generation vehicles; exploiting new electric, shared, connected, and autonomous technologies; and optimizing the transport and delivery of goods. Integrating urban mobility with the transformation of energy systems would create new opportunities.
The automation of vehicles and machines does not rely only on energy supply and technologies. While the energy mix affects powertrain technologies, automated vehicles could operate with various sets of powertrain motors, including conventional ones. The question is thus concerned about the range and availability of automated vehicles. Conventional powertrains allow a range of a few thousand kilometers for trucks, while light-duty vehicles can drive at least 500 km without refueling. There is also an exceptionally reliable and comprehensive sociotechnical system to produce and distribute conventional fuels.
However, there is no such confidence regarding emerging energy technologies, including electricity or hydrogen-based solutions. Many unknowns and uncertainties persist with no clear roadmaps to guide public and private investment strategies and plans.
A key issue is the integration of vehicles into energy systems as well as technologies and infrastructure in order to build a genuine vehicle-to-grid system. In this system, where would users recharge or refuel robomobile vehicles and machines? How can a common framework of investment and financing for both energy and physical infrastructure networks help design robomobile systems that optimize energy consumption, storage, and distribution?
Third, physical infrastructure has always been of great interest for economic investments at all geographical levels. Robomobility is no exception, as automated vehicles require high-quality and reliable physical infrastructure. The 2019 Task Force of the World Road Association highlights the need for integration between digital and physical infrastructures for robomobility networks, applications, and uses, as stated above. The Task Force also raises issues about the timeline of technology implementation and whether interurban roads should be prioritized over urban and suburban networks.
Indeed, public funding would give visibility to private investors in new markets. If public funding targets urban infrastructure, it would support the development of automated shuttles for passenger transportation, drones and robots for deliveries, and robotaxis, for example. Investments in interurban roads and transcontinental transport corridors could create value for industrial supply chains and contribute to an international division of labor and economic globalization.
Moreover, investments could be made into both urban and interurban infrastructure. Infrastructure investments and sociotechnical systems based on these infrastructures would shape lifestyles, society, and economic systems. New players may come from the energy industry and digital economy, such as energy and utility and technology companies. To accommodate this, the holistic approach of Business Ecosystems (Moore 1993), bundled with two-sided business platforms (Gawer and Cusomano 2002; Parker, van Alstyne, Choudary 2016), offer good alternatives for governance, as well as value creation, among the various stakeholder groups.
Policy Options
- Integrate shared and automated mobility services with transit, walking, and cycling in order to reduce energy use and carbon emissions
- Integrate functionalities to transform transport infrastructure into territorial infrastructure that supports a broad range of services: energy consumption management, energy distribution networks, digital services and connectivity networks, supply chain management and logistics, infrastructure maintenance operations, etc.
- Encourage multisectoral consortia of both public and private partners to invest in robomobility infrastructure and enact regulation to prevent the emergence of a dominant economic monopoly or oligopolistic markets
Explore New Models of Infrastructure Management at the Earliest Stage of Investing and Financing
Rationale
The product–service system concept of Tukker (2004) is a system of products, services, supporting networks, and infrastructure designed to be competitive, satisfy customer needs, and have lower environmental effects than traditional business models. This concept seems to be appropriate for the bundled robomobile services offer.
Upgrading existing transport infrastructure will require massive investments over multiple decades in order to ensure the safety and performance of automated vehicle uses. Further, infrastructure quality varies greatly worldwide. Countries in the Global North are known to have better road and transport infrastructure as well as higher investment ratios. This is not true across all countries, especially those in the Global South. For instance, a National Transport Confederation survey of Brazil shows that, of 1,720 million km of total road length, only 12.4% (213,453 km) was paved by 2017 (Confederação Nacional dos Transportes 2018). Thus, implementing robomobile services in countries with poor road infrastructure could be hampered, since public and private investments tend to prioritize urgent short-term demands.
Although a comprehensive estimation of the needed investment is not yet available, the growing consensus among mobility experts is that these investments cannot be financed by the transportation sector only. Therefore, what kinds of incentives could be set up to attract infrastructure investment from actors outside the traditional transportation sector? What shall be the objectives, extents, and limitations of such investments?
There are numerous precedents in various countries and continents, where investment models have played a key role in the design of infrastructure. In California and other locations in the United States, public authorities have invested in additional highway lanes dedicated to high-occupancy vehicles and vehicles paying a toll (highoccupancy toll lane). The two main goals are to decrease congestion on the highways network and improve air quality in metropolitan areas.
In Japan, transport-oriented development and region-oriented development policies involve investment and financing of rail stations and their surrounding areas by infrastructure management operators and transportation services operators. This allows for coordination and integrated benefits from rail connectivity, rail station facilities, and land economic value generated from the improved accessibility.
In the Copenhagen region, the financing model of a new metro lane has also included a real-estate dimension. The planning agency takes the income from the real-estate management to invest in infrastructure development.
Robomobility can play a part in the mobility shift, as robomobile services would align with key aspects of the desired transformation:
- There exists a risk of “rebound effects” of mobility because of automated driving. Vehicle ownership, trip frequency, and modal share of the vehicle—both for short and long distances—as well as urban sprawl could be affected (Le Gallic and Aguilera 2019). The literature describes futures that differ greatly in terms of carbon footprint and energy consumption depending on whether autonomous vehicles will be privately owned or shared, but also whether shared vehicles will be available for all kinds of origins and destinations, or strongly articulated with public transit (Gruel et al. 2016; Kröger et al. 2018; Nazari et al. 2018). The three scenarios also lead to different living conditions that can vary in their desirability according to cultural contexts or individual aspirations. Public decision-makers must be aware of these challenges, and accordingly design a set of policies that prioritize collective and collaborative robomobilities. This process starts with the design and management of infrastructure that supports on-demand robomobility services, increases highoccupancy vehicle use, and improves complementarity between mass transit networks and active modes.
- Robomobility services are brand new services and are to be designed from the very beginning in the right direction. As they involve powertrain technologies and energy issues, such services can adapt to different technologies. They are a very agile, if yet-to-be-defined, model. Unlike existing systems, robomobility systems do not hinder the emergence of new energy systems.
- Robomobility, connectivity, and digitalization share a common DNA, wherein new fuel is powered through data in a sociotechnical system where artificial intelligence analyzes both machines uses and human lifestyles.
The robomobile change may not be the “next big thing,” but it can still be a key part of reshaping new sociotechnical mobility systems. This is because robomobility embraces and combines multiple broad transformations, both for passengers and good transportation and for the integration of digital and real life.
Policy Options
- Focus on infrastructure investments that support a strategic approach for shared and targeted robomobility that is consistent with long-term planning in cities and territories for climate change as well as ecological global and local challenges— for example, support investment in robomobile shuttles for feeder services to rail stations in rural areas.
- Invest in infrastructure that supports MaaS models
Explore New Systemic Risks Related to Robomobility Infrastructure Systems Integration
Rationale
Automated vehicles and robomobile applications depend on a large set of highly integrated infrastructures. How can we avoid a system global shutdown or blackout if only one part of the system fails?
Cybersecurity threats are well known among those working on automated vehicles. They follow the concerns already raised by the generalization of connectivity technologies in every aspect of daily life and industrial processes. That is,
- Safety of the driving operations, such as risk of remote vehicle hacking;
- Privacy issues regarding the collection of individual, commercial, and industrial data;
- Reliability challenges, given the interdependence among multiple technical systems, both digital and physical;
- Liability issues from the complexity and intricacy of technical systems; and
- New systemic risks in functions that may rely on robomobile applications and uses. For example, goods transportation is a very resilient system because it is decentralized and relies on millions of fleet drivers. If some categories of goods are transported by robomobile vehicles and systems, how do we manage a potential severe dysfunction of robomobile systems?
As Evans et al. (2020) explain in a previous T20 policy brief,
“transport infrastructure systems and services are an attractive target for radical activists and terrorist groups, who often act with the explicit intention to disrupt transport flows and harm passengers and people. Other motivations can be to make a political statement, or to make economic profit by blackmailing the affected country”.
Thus, robomobility infrastructure design should include security considerations assuming different degrees of resilience through a cost–benefit analysis.
Policy Options
- Enact regulations that protect privacy and prevent the development of economic and technological dominant positions
- Promote resilience assessment as a ground rule of sociotechnical systems that include robomobility services
Develop the system architecture for robomobility systems according to a “security by design” principle, that is, cybersecurity systems would be built-in features from the beginning of systems development.
Disclaimer
This policy brief was developed and written by the authors and has undergone a peer review process. The views and opinions expressed in this policy brief are those of the authors and do not necessarily reflect the official policy or position of the authors’ organizations or the T20 Secretariat.
References
Axelrod, Robert, and Michael D. Cohen. 2008. Harnessing Complexity. Basic Books.
ASIN: B06XC5D73G.
Confederação Nacional dos Transportes. 2018. “Anuário CNT do Transporte:
Estatísiticas Consolidadas.” Accessed February 25, 2020. https://anuariodotransporte.cnt.org.br/2018.
De Gouvello, Christophe, The World Bank. 2018. “Low Carbon Livable (LoCAL) Urban
Forms. International and Chinese Best Practices. Unveiling the Key Levers of Cities
Energy Consumption and Emissions,” based upon: Salat, Serge. 2018. “Low Carbon
Urban Forms for China. Impacts of Land Use and Urban Fabric Morphology on
Buildings’ Energy Loads and on Transportation Energy in Beijing, Qingdao, Taiyuan,
and Ningbo.” Unpublished report to the World Bank. Ningbo Practice of “Two
Mountains Theory” Conference, Low Carbon Urban Forms Sub-Forum – Ningbo,
November 8, 2018.
Evans, Caroline, Bruno Godart, Jürgen Krieger, Jean-Bernard Kovarik, Marc Mimram,
and Fabien Palhol. 2020. “Building Resilient Infrastructure Systems.” T20 Japan 2019.
Accessed March 10, 2020. https://t20japan.org/wp-content/uploads/2019/03/t20-japan-tf4-5-building-resilient-infrastructure-systems.pdf.
Gandia, Rodrigo Marçal, Fabio Antonialli, Bruna Habib Cavazza, Arthur Miranda Neto,
Danilo Alves de Lima, Joel Yutaka Sugano, Isabelle Nicolai, et al. 2018. “Autonomous
Vehicles: Scientometric and Bibliometric Review.” Transport Reviews 39, no. 1
(September): 9–28. https://doi.org/10.1080/01441647.2018.1518937.
Gawer, Annabelle, and Michael A. Cusumano. 2002. Platform Leadership: How Intel,
Microsoft and Cisco Drive Industry Innovation 1st edition. Boston: Harvard Business
School Press. ISBN: 1578515149, 9781578515141.
Global Mobile Suppliers Association. 2020. “5G Market: Snapshot March 2020.”
Accessed March 20, 2020. https://gsacom.com/paper/5g-market-snapshotmarch-2020.
Gruel, Wolfgang, and Joseph M. Stanford. 2016. “Assessing the Long-term Effects of
Autonomous Vehicles: A Speculative Approach.” Transportation Research Procedia
13: 18–29. https://doi.org/10.1016/j.trpro.2016.05.003.
Hietanen, Sampo. 2014. “’Mobility as a Service’ – The New Transport Model?”
Eurotransport 12, no. 2: 2–4.
International Energy Agency. 2017a. “Digitalisation and Energy.” Technology Report.
Accessed February 25, 2020. www.iea.org/digital.
International Energy Agency. 2017b. “Tracking Clean Energy Progress 2017.” Report.
Accessed February 25, 2020. https://www.iea.org/publications/freepublications/publication/TrackingCleanEnergyProgress2017.pdf.
International Energy Agency. 2020. “Tracking Transport.” Accessed June 25, 2020.
https://www.iea.org/reports/tracking-transport-2020.
Johnson, Charles, and Jonathan Walker. 2016. “Peak Car Ownership: The Market
Opportunity for Electric Automated Mobility Services.” Rocky Mountain Institute.
Accessed March 4, 2018. https://rmi.org/wp-content/uploads/2017/03/Mobility_PeakCarOwnership_Report2017.pdf.
Kröger, Lars, Tobias Kuhnimhof, and Stefan Trommer. 2018. “Does Context Matter?
A Comparative Study Modelling Autonomous Vehicle Impact on Travel Behaviour
for Germany and the USA.” Transportation Research Part A: Policy and Practice 122
(April): 146–161. https://doi.org/10.1016/j.tra.2018.03.033.
Le Gallic, Thomas, and Anne Aguilera. 2019. “Where Shall Autonomous Vehicles
Drive Us? Three Lifestyle Scenarios Based on a Literature Review. Synthesis of
the Main Findings.” Accessed March 15, 2020. https://www.lvmt.fr/wp-content/uploads/2019/12/20191217-DGITM-VA-modes-vie_-Synthesis-GB.pdf
Moore, James F. 1993. “Predators and Prey: A New Ecology of Competition.” Harvard
Business Review 71, no. 3 (May–June): 75–86. https://hbr.org/1993/05/predators-andprey-a-new-ecology-of-competition#:~:text=Consider%20predators%20and%20their%20prey,species%20may%20lose%20their%20leadership.
Nazari Fatemeh, Mohamadhossein Noruzoliaee, and Abolfazl (Kouros) Mohammadian.
2018. “Shared Versus Private Mobility: Modeling Public Interest in Autonomous
Vehicles Accounting for Latent Attitudes.” Transportation Research Part C: Emerging
Technologies 97 (December): 456–477. https://doi.org/10.1016/j.trc.2018.11.005.
Ostrom, Elinor. 1990. Governing the Commons: The Evolution of Institutions for
Collective Action. Cambridge, UK: Cambridge University Press. ISBN: 0-521-40599-8.
Parker, Geoffrey G., Marshall W. Van Alstyne, and Sangeet P. Choudary. 2016. Platform
Revolution: How Networked Markets are Transforming the Economy and How to
Make Them Work For You 1st edition. New York: W. W. Norton & Company. ISBN:
0393249123, 9780393249125.
The Global Commission on the Economy and Climate. 2014. “Better Growth, Better
Climate: The Synthesis Report.” The New Climate Economy Report. Accessed
March 5 , 2020. https://newclimateeconomy.report/2016/wp-content/uploads/sites/2/2014/08/BetterGrowth-BetterClimate_NCE_Synthesis-Report_web.pdf.
Tukker, Arnold. 2004. “Eight Types of Product-Service System: Eight Ways to
Sustainability? Experiences from Suspronet.” Business Strategy and the Environment
13, no. 4 (July): 246–260. https://doi.org/10.1002/bse.414.
Wadud, Zia, Don MacKenzie, and Paul Leiby. 2016. “Help or Hindrance? The Travel,
Energy and Carbon Impacts of Highly Automated Vehicles.” Transportation Research
Part A: Policy and Practice 86 (April): 1–18. http://doi.org/10.1016/j.tra.2015.12.001.
Appendix
[1] . In the post-COVID-19 economic recovery plans, transport automation shall be included.
[2] . Robomobility is a status of mobility wherein driverless vehicles (road, rail, aerial, and maritime; for passengers and freight transportation) are ubiquitous (or at least mostly dominant).
[3] . Robomobility services are a diverse and large range of mobility services associated with automated vehicles. Examples of robomobility services include taxi drones, driverless shuttles for transportation of disabled persons, driverless trucks platoons for freight long distance transportation, and short distance delivery drones.
[4] . Sociotechnical systems are complex systems characterized by strong interactions between infrastructures, technology, and people, common in major technological changes in contemporary societies. Policymakers’ challenge is to anticipate societal changes so as to monitor them with respect to their political objectives.
[5] . A review of autonomous vehicle literature/research by Gandia et al. (2018) shows that the focus of R&D in automated vehicles has been reoriented toward socioeconomic aspects than only technical issues.
[6] . The MaaS concept combines different transport modes to offer a tailored mobility package; it includes complementary services such as trip planning, reservation, and payments through a single interface (Hietanen 2014).
[7] . Owing to growth opportunities in Internet of Things and ManytoMany communication technologies, 5G networks are expected to play a vital role in manufacturing, healthcare, aerospace and defense, industrial, automotive, and other sectors.
[8] . More alarmingly, the transport sector is the fastest growing consumer of fossil fuels and the fastest growing source of CO2 emissions. As developing countries rapidly urbanize, energy consumption and CO2 emissions from urban transport are increasing in tandem. Emissions increased by 2.5% per year between 2010 and 2015 (International Energy Agency 2017b). New analysis suggests that the world’s 724 largest cities could reduce greenhouse gas emissions by up to 1.5 billion tons of CO2 equivalent (CO2e) annually by 2030, primarily through transformative change in transport systems (The Global Commission on the Economy and Climate 2014).